试题详情
- 简答题试分析比较闭环控制系统与半闭环控制系统的主要区别。
-
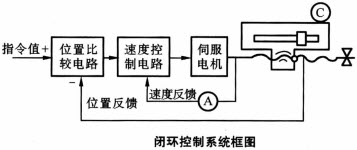
闭环控制系统的位置测量元件直接对工作台的实际位移量进行检测。如图所示,A为速度测量元件,C为位置测量元件,由A将速度反馈信号送到速度控制电路,由C将工作台实际位移量反馈至位置比较电路,系统通过与指令值比较后的差值进行控制。闭环控制系统可以消除包括工作台传动链在内的误差,定位精度高,调节速度快。但由于工作台惯量大,对系统稳定性不利,且系统较复杂、成本高。
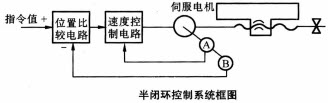
半闭环控制系统通过测速发电机A和光电编码器B间接测量伺服电机的转角,推算出工作台的实际位移量。系统通过此值与指令值进行比较,以差值实现控制。半闭环控制系统没有把工作台传动链包括在控制回路内,这类系统的控制方式介于开环与闭环之间,精度没有闭环高,但成本较低,调试方便,因此得到了广泛的应用。 关注下方微信公众号,在线模考后查看

热门试题
- 传统设计方法的特点是()
- 用户设备需输入PLC的各种控制信号,通过
- 试分析直流伺服电机与交流伺服电机在控制上
- “8086执行了一个总线周期”是指808
- 机电一体化中接口是什么?
- 一台220/110V的单相变压器,低压侧
- 闭环数控系统中,位置检测元件是()。
- 光电编码器是一种码盘式角度检测元件。
- 闭环伺服系统数控机床不直接测量机床工作台
- 热电阻温度传感器的工作原理是基于金属的(
- CNC系统的插补运算属于()。
- 半闭环伺服结构的特点包括:()
- 机电一体化的三大效果是指省能、省资源及智
- 什么是霍尔效应线位移传感器?有什么特点?
- 机电一体化系统结构中驱动模块的作用是什么
- 什么是PLC的扫描工作制?
- 控制及信息处理单元一般由()、()、()
- 简述机电一体化系统的执行元件应满足的性能
- 滑动导轨副产生低速爬行的主要原因是摩擦系
- 灵敏度(测量)