试题详情
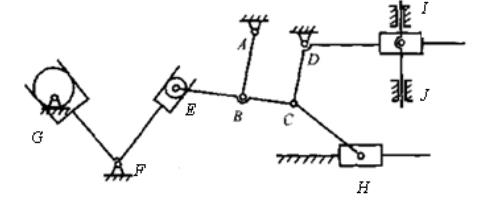
- 简答题计算下图所示机构的自由度,若有复合铰链,局部自由度,虚约束请指出。

关注下方微信公众号,在线模考后查看

热门试题
- 图示为手动起重葫芦,已知z1<
- 两构件通过线接触组成的运动副称为低副。
- 为什么一对平行轴斜齿轮传动的重合度比一对
- 渐开线直齿圆柱齿轮传动的重合度是实际啮合
- 一对渐开线标准直齿轮非标准安装时,节圆和
- 在尖顶推杆盘型凸轮机构中,若将原来的尖顶
- 已知一对正常齿制的渐开线标准外啮合直齿轮
- 平面四杆机构不是结构最简单的平面多杆机构
- 为使机构具有急回运动,要求行程速比系数(
- 标准齿轮的分度圆与节圆重合。
- 凸轮机构从动件运动规律的选择原则为满足(
- 机构的级别是由机构中包含最多的杆组的级别
- 铰链四杆机构具有急回特性的条件是()。
- 若机构正反行程效率分别用η和η′表示,则
- 已知图示机构各构件的尺寸,构件1以匀角速
- 根据渐开线性质--基圆内无渐开线,所以渐
- 如图所示为一人体义腿膝关节机构,若以胫骨
- 刚性转子的动平衡的条件是()。
- 已知一对外啮合变位齿轮传动的Z
- 曲柄滑块机构的行程速比系数为()。