试题详情
- 简答题 功频电液控制的基本原理
-
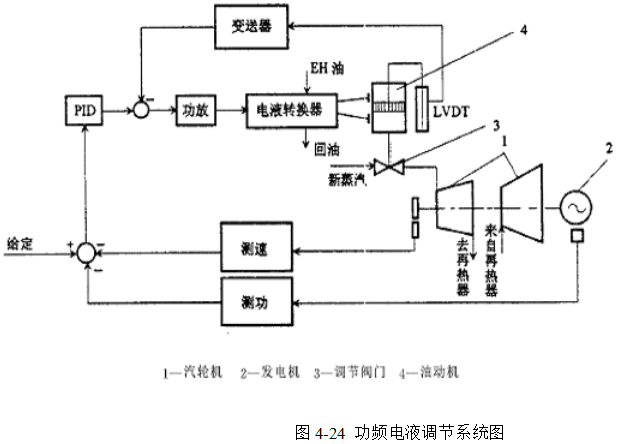
上图是功频电液控制系统的基本工作原理图,当外界负荷增加时,汽轮机转速下降,测频单元感受转速变化,产生一个与转速偏差成比例的电压信号△Uf,输入到PID控制器,经PID运算后输入到电液转换器的感应线圈,当线圈的电磁力克服了弹簧的支持力后,使高压抗燃油(EH油)进入油动机底部油动机上行开大了调节阀门,增大了汽轮机的功率,与外界负荷变化相适应。汽轮机的功率增加后,测功元件感受到了这一变化,输出一负的电压信号△Up到PID控制器。如果△Up=△Uf,且两者的极性相反,其代数和为零,此时PID的输出不变,因此控制系统的一个过渡过程动作结束。当外界负荷减小时其控制过程与上述相反。
当新汽压力降低变化时,在同样阀门开度下汽轮机的功率减少,这时测功单元输出电压信号减小,因此在PID入口仍有正电压信号存在,使PID输出信号继续增加,经功放、电液转换器和油动机后又开大调节阀门,直到测功元件输出电压与给定电压完全抵消时,即使得PID的入口信号代数和为零时才停止动作。由此可见,采用了测功单元后可以消除新汽压力变化对功率的影响,从而保证了频率的偏差与功率变化之间的比例关系。即保证了一定的速度不等率,也就是保证了一次调频的能力不变。
利用测功单元和PID控制器的特性也可补偿功率滞后。当外界负荷增加时使汽轮机转速下降,测频单元输出正电压信号作用于PID控制器,经过一系列的作用开大调节阀门,首先使高压缸增加功率,但此时由于中压缸功率增加缓慢,使测功元件输出信号很小,不足以抵消测频单元输出的正电压信号,因此,高压调节阀门继续开大,即产生过开。这样高压缸因过开而产生的过剩功率刚好抵消了中压缸功率的滞后。当中低压缸功率滞后逐渐消失时,由于测功元件输出电压的作用又使高压调节阀门关小;当中低压功率滞后完全消失后,高压调节阀门开度又回到稳态设计值。此时控制系统动作结束了。 关注下方微信公众号,在线模考后查看

热门试题
- 在整个测量系统中热电偶,热电阻作为测温元
- 机柜接线,()与端子连接应()。端子每侧
- 给水自动调节系统的基本方案有哪些?
- 热工仪表是由那几部分组成的?
- 热工检修中,重新焊接或安装的所有测温、测
- 衡量活塞式压气机性能的优劣,用()。
- 电路的基本物理量有哪些?
- 旁路系统的基本功能有哪些?
- 汽包锅炉燃烧自动调节的任务是什么?
- 分布式计算机与管理系统有哪些层次?
- 在绝热、恒容、W=0的封闭系统内发生下列
- 直流锅炉给水调节系统的任务?
- 《中华人民共和国电力法》中规定制定电价有
- 配镍铬-镍铜热电偶的补偿导线是(),配镍
- 抽汽逆止门联锁的作用是什么?
- 不同的热机工作于T1=600K的高温热源
- 简述电容式压力(差压)变送器有哪些特点?
- 为什么在动圈式温度仪表内设置温度补偿电阻
- 判断酸度计仪表测量结果的准确性,除对仪表
- 什么叫译码器?