试题详情
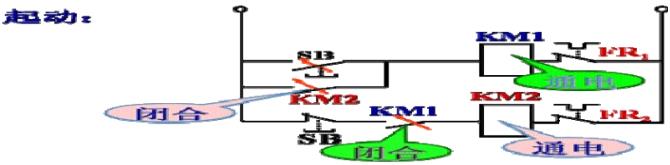
- 简答题两条皮带运输机分别由两台鼠笼异步电动机拖动,由一套起停按钮控制它们的起停。为避免物体堆积在运输机上,要求电动机按下述顺序起动和停止:起动时:M1起动后M2才能起动;停车时:M2停车后M1才能停车。应如何实现控制?
关注下方微信公众号,在线模考后查看

热门试题
- 电路元件的伏安关系多是激励与响应的关系。
- 理想运放同相输入端和反相输入端的“虚短”
- 电路如图所示,设二极管为理想元件,其正向
- 一门电路的输入端A、B和输出端F的波形如
- 变压器原绕组100匝,副绕组1200匝,
- 为了减小放大电路的输入电阻,应引入()负
- 放大电路内部各量均为()。
- 三相异步电动机旋转磁场的转速与()。
- 在图中,对称负载联成Δ形,已知电源电压U
- 组合电路是由()
- 在图中,电流表A1,和A2的读数分别为I
- 为了增大放大电路的输入电阻,应引入()负
- 在单相桥式整流电容滤波电路中,若有一只整
- 在下图中,E=20V,R1
- 图示电路中U=220V,C=1μF
- 某晶体管工作在放大区,如果基极电流从10
- 一电阻元件的额定参数为1KΩ、2.5W,
- 有一Z2-32型他励电动机,其额定数据如
- 一台正常工作时定子绕组为△形联接的三相鼠
- 在图中输出变压器的副绕组有中间抽头,以便