试题详情
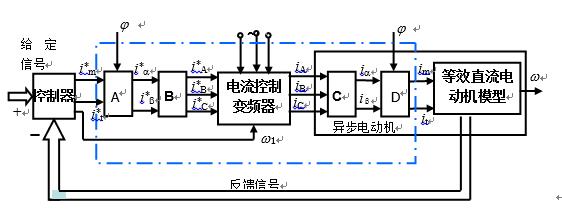
- 简答题 下图为异步电动机矢量控制原理结构图,A,B,C,D分别为坐标变换模块,请指出它们分别表示什么变换?这些变换的等效原则是什么?
-
A.矢量旋转逆变换VR-1;
B.二相静止坐标变成三相静止坐标变换;
C.三相静止坐标系变成二相静止坐标变换;
D.矢量旋转变换VR,将二相静止坐标下的互相垂直的交流信号变换成二相旋转的互相垂直的直流信号。
旋转磁场等效或磁动势等效 关注下方微信公众号,在线模考后查看

热门试题
- 工作在交流1000V的电器称为()
- 位能转矩的方向与系统的运动方向相反。
- 正弦波脉宽调制的英文缩写是()
- 按定子磁链控制的直接转矩控制(DTC)系
- 直流他励电动机的机械特性属于()。
- 电机与工作机构的轴直接连接的系统称为()
- 电流互感器在运行中不得使副边绕组()。
- 闭环调速系统有哪些基本特征?它能减少或消
- 静差率和调速范围两项技术指标是互制约的(
- 三相异步电动机根据转子结构不同可以分为(
- 简述直流电动机的基本结构和基本工作原理。
- 什么是位能转矩?
- 串级调速系统可以实现异步电机的()调速,
- 电压型逆变器适宜于不经常起动、制动和反转
- 双闭环调速系统中,通常把电流环称为外环,
- 区分感应电动机次同步串级调速与超同步串级
- 常见的转速检测装置有()、旋转编码器、电
- 三相全控桥变流器,接反电势、电阻、电感
- 一台直流他励电机额定功率PN=96KW,
- 通过坐标系变换,可以找到与交流三相绕组等