试题详情
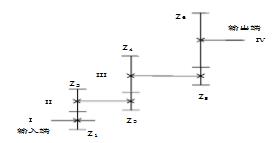
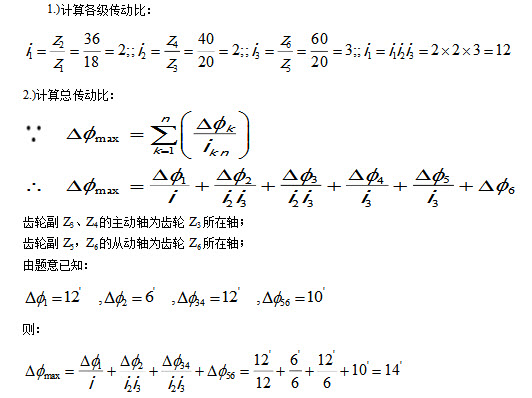
- 简答题已知图示齿轮传动系统中齿轮Z1相对于自身回转轴线的总转角误差为,齿轮Z2相对于其自身回转轴线的总转角误差为,齿轮副Z3、Z4轮折算到其主动轴上的总转角误差为,齿轮副Z5,Z6折算到从动轴上的总转角误差为。计算该齿轮传动系统折算到输出端的总转角误差。其中:齿轮的模数均为,Z1=18,Z2=36,Z3=20,Z4=40,Z5=20,Z6=60。
关注下方微信公众号,在线模考后查看

热门试题
- 设计机械设备电气控制系统时不需要分析的是
- M8000的继电器的名称为()。
- 气压式伺服驱动系统常用在定位精度较高的场
- 采样/保持器
- 在可编程控制器的编程中,同一继电器线圈在
- 根据“机电一体化设备组装工艺规范”,一束
- 分析题:试分析比较直流测速发电机和光电编
- 提高传动精度的结构措施有()。
- 增益误差补偿又称为(),采用软件方法对系
- 描写静态系统的数学模型是()
- 在控制感性负载器件的直流功率接口中,为了
- 数控机床若要求单步点动,则伺服系统速度要
- 摩擦对伺服系统的影响主要由()
- 伺服系统
- 简述步进电动机的工作原理。目前在工业中广
- 工业控制计算机分为()、和()
- 抗干扰技术就是研究电子设备及系统抵抗外部
- 接口的基本功能主要有()。
- 机电一体化系统的基本要素有哪些?喷漆机器
- PLC与通用微型机有什么区别?