试题详情
- 简答题试述PID控制的数学模型及参数意义。
-
比例积分微分控制规律为:
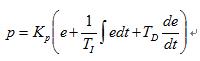
P为输出变化量;Kp为放大倍数即比例增益;e为输入信号的偏差;TI为积分时间即控制器消除偏差的调整时间;TD为微分时间;de/dt为偏差信号变化速度。 关注下方微信公众号,在线模考后查看

热门试题
- 什么是冷端温度补偿?有哪些冷端温度补偿方
- 什么是物理爆炸?
- 在溶液状态图中,溶液自发产生晶核的区域是
- 现用一支镍铬—镍硅热电偶来
- 与电源左母线相连,表示一个逻辑行或程序段
- 制备催化剂时,沉淀为什么要陈化?
- 阳碳离子能自动(),伯碳离子自动转仲碳,
- 有氢气和氮气合成氨的反应中,生产1吨氨所
- 对于一定水分蒸发量及空气出口湿度,则应按
- 填料塔中填料的主要作用是()。
- 在一定温度下,气体在液体中的溶解度与其在
- 何为控制阀的理想流量特性和工作流量特性?
- 显示仪表
- 催化裂化反应中对于碳原子数相同的烃类分子
- 某物质在0℃时的溶解度为0.815g,其
- 两个电阻,当它们并联时的功率比为16∶9
- 在化工生产中,“四懂”指的是什吗?
- 指出常用的管路(流程)系统中的阀门图形符
- 对流段锅炉给水盘管的泄漏会导致汽包液位(
- WAO