试题详情
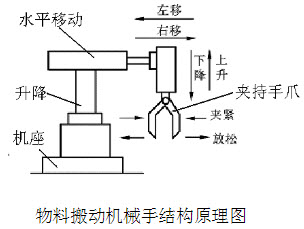
- 简答题 某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
-
系统设计的详细工程路线:
(1)确定目标及技术规范:
机械手的用途:物料搬运。
工作方式:手动、自动方式。
主要技术参数:3自由度。
使用环境要求:生产线。
(2)可行性分析:收集资料、市场分析、可行性分析、技术经济性分析。
(3)总体方案设计:机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。
(4)总体方案的评审、评价
(5)理论分析阶段
机构运动学模型、作业空间分析;机构的力学计算;驱动元件的选择、动力计算;传感器选择、精度分析;建立控制模型、仿真分析。 关注下方微信公众号,在线模考后查看

热门试题
- 以下抑制电磁干扰的措施,除了(),其余都
- 在小功率传动链中,为使总的折算惯量最小,
- 在闭环控制系统中,驱动装置中各环节的误差
- 在工控机系统的总线中,控制总线的功能是确
- 与交流同步电机一样,笼型交流异步电机也可
- 齿轮传动的总等效惯量随传动级数()。
- 在机电一体化产品开发性设计是在保持原理方
- 驱动部分在控制信息作用下提供动力,伺服驱
- ()又称为力矩电动机,在位置控制方式的伺
- 直流伺服电动机和永磁同步交流伺服电动机都
- 在机电一体化产品变参数设计是指改变部分结
- PID控制算法中比例、积分、微分部分各起
- 按输出轴的转角误差最小原则,减速链传动中
- 某机电一体化系统需要消除斜齿轮传动的齿侧
- 用PLC实现对一台电动机的正反转控制。控
- 某工作台采用直流电机丝杠螺母机构驱动如图
- 直流伺服电动机的机械特性是电机转速与其控
- 对应于某一频率,只有负载小于步进电机在该
- 简述数控设备中计算机数控装置的组成和功能
- 数字化物理样机就是一种结构设计软件,强调