试题详情
- 简答题简述GPS+DR+MM组合定位系统。
-
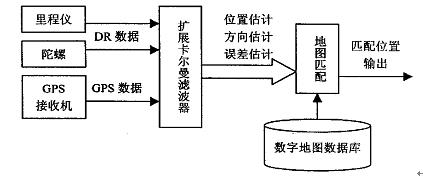
GPS+DR+MM组合定位子系统首先在每个采样时刻k=nT由扩展Kalman滤波器处理DR传感器和GPS的量测数据并给出车辆位置估计、行车方向估计以及定位误差估计;然后将滤波器输出的这些最优估计输入到地图匹配模块,由地图匹配算法计算出当前时刻的匹配位置坐标,即为车辆当前的位置输出。 关注下方微信公众号,在线模考后查看

热门试题
- 精度因子
- 地球瞬时自转轴在地球上随时间而变,称为(
- GPS时属于原子时系统,其秒长和原点与国
- 简述GPS网的图形设计及图形布设方式。
- 卫星在轨道运行过程中的受力主要有哪些?
- GPS观测工作的内容主要包括()、仪器的
- 多路复用通道接收机
- 简述GPS卫星信号的组成部分。
- 观测时段
- 车辆定位系统的多址接入方式有哪几种?各自
- 在进行GPS 测量时,观测量中存在着()
- 简述GPS网的图形设计。
- 选点时,要求点位周围无反射物,以免()影
- ()年10月4日,世界上第一颗人造地球卫
- 当用户接收设备安置在运动的载体上而处于动
- 基线解算完成后的成果分析有哪四个?
- GPS卫星星历分为预报星历(广播星历)和
- “Transit系统是一个连续、独立的卫
- 双差可消除接收机钟差影响。
- 什么是SA政策?什么是AS政策?