试题详情
- 简答题简述绕X坐标轴旋转的死坐标数控机床的后置处理过程并给出相应的变换举证。
-
(1)设刀轴矢量a为自由矢量,首先将刀轴矢量的起点移动到工件坐标系的原点,然后将刀轴矢量绕X轴顺时针转到与Z坐标方向一致。
(2)将刀轴矢量a的转动转化为刀具相对于工件的转动:使刀具相对于工件绕X轴逆时针转动角A(逆时针转动可保证转动角A为正),其中A角的计算公式(注意角A的计算一定是从Z轴开始)如下:
(3)求刀心C0经工件转动后在工件坐标系OwXYZ中的位置,设机床的运动坐标值为X、Y、Z,工件绕X轴旋转角为A,则有:(X,Y,Z,1)=(xc0,yc0,zc0,1)T,T为坐标变换矩阵,其值为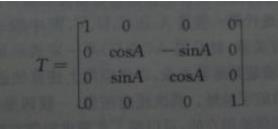
关注下方微信公众号,在线模考后查看

热门试题
- 一般数控车床为三轴三联动数控机床。()
- 数控机床的伺服系统主要由驱动装置、()、
- 下面()不属于计算机辅助制造狭义范畴。
- 提高三坐标测量机的测量精度的方法有()。
- 在应用图像编程软件编程的过程中,经过刀位
- APT自动编程语句按功能分可分为()4类
- 高速铣削的效率高,故数控加工是尽量选用高
- APT自动编程中几何图形定义语句作用是用
- 检索式CAPP系统是()。
- 解释PDM的定义及实质。
- 如果已知某NC机床的脉冲当量为0.005
- 选择夹具时应充分考虑零件加工的()性和(
- 加工曲面时,无论粗、精加工都采用球头铣刀
- 柔性编码系统的编码由()部分组成。
- 数控编程中走刀路径的选择应遵循哪些原则?
- 数控编程中走刀路径的选择原则是保证最高的
- 不需要对测头半径进行三维补偿才能得到真实
- 测量头从结构原理来看可分为()、()、(
- 三坐标测量记得测量方式一般有()、()、
- 在CAD作业中,对有计算公式的工程线图进