试题详情
- 简答题如图所示是一个空间起飞助推器的姿态控制模型示意图。这是一个倒摆,安装在马达传动车上,我们要使摆保持在垂直位置。我们只考虑二维问题,即认为摆只在如图所示的图面运动。为了保持上摆位于垂直位置,我们连续地测量
 ,形成控制力u(t),使
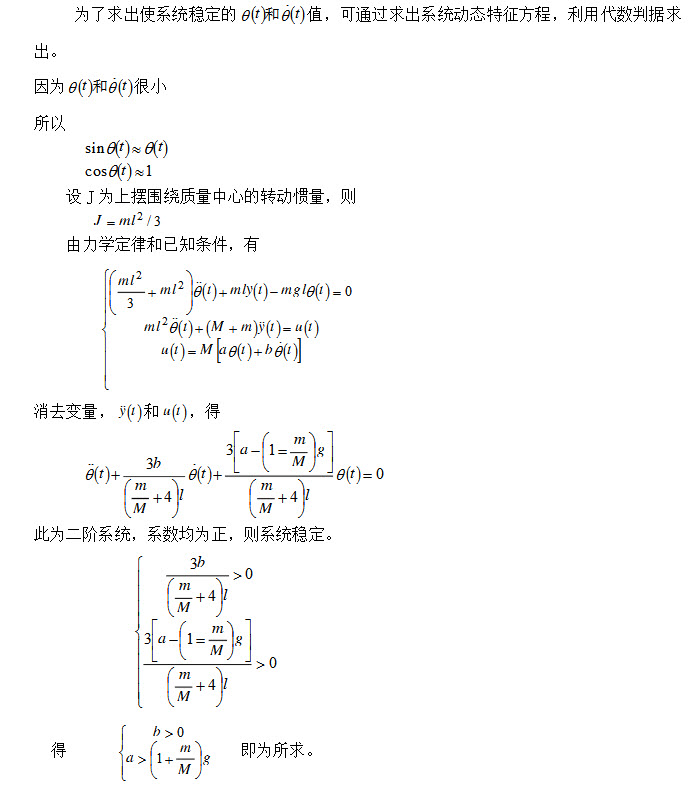
,形成控制力u(t),使 试确定使系统稳定的a、b值,假设在摆轴上和车轴上无摩擦,并假设很小。
试确定使系统稳定的a、b值,假设在摆轴上和车轴上无摩擦,并假设很小。 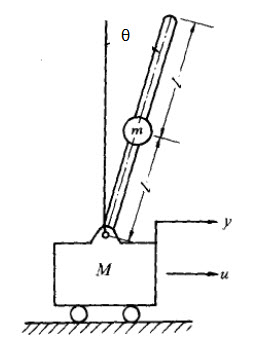
关注下方微信公众号,在线模考后查看

热门试题
- PID调节器的比例部分主要调节系统的()
- 系统的单位脉冲响应函数为 w
- 满足叠加原理的系统是()系统。
- 把系统扰动作用后又重新平衡的偏差称为系统
- 闭环控制系统中()
- 欠阻尼二阶系统的输出信号以()为角频率衰
- 说明如何减小自动调速系统的稳态误差及实现
- 频率特性
- 线性定常系统输出响应的等幅振荡频率为&o
- 当系统极点落在复平面S的负实轴上时,其系
- 要想减少二阶欠阻尼系统的上升时间,可以采
- 含有扰动顺馈补偿的复合控制系统可以显著减
- 时间响应
- 理想微分环节的传递函数为()。
- 系统开环传递函数为不用计算或作图,凭思考
- 数学模型
- 比例积分微分(PID)校正对应()
- 一个反馈控制系统的特征方程为s
- 衡量惯性环节惯性大小的参数是()
- 0型系统跟踪斜坡信号的稳态误差为()