试题详情
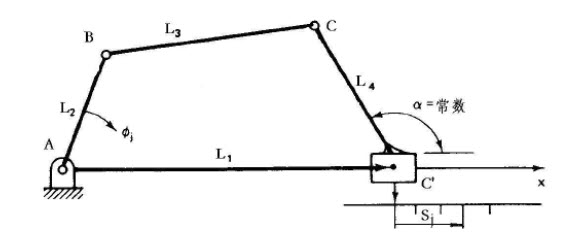
- 简答题设计一个带有一个移动副的四杆机构(如图),实现输入杆AB转角φj与输出滑块CC’的移动Sj之间的对应关系。已知起始时φ0和S0、固定铰链点A的坐标。 (1)分别写出从起始位置到第j组对应位置,构件AB和滑块的位移矩阵; (2)如何得到机构的设计方程? (3)分析该机构最多能够实现多少组精确对应位置关系 (4)如何求出机构的L2,L3,L4α等机构运动参数?

关注下方微信公众号,在线模考后查看

热门试题
- 为减小凸轮机构的压力角,可采取的措施有(
- 一对标准渐开线直齿圆柱齿轮,已知:m=4
- 一对渐开线直齿圆柱齿轮啮合传动时,其啮合
- 在蜗杆传动中,引入特性系数q的目的是()
- 在图示的2K–H型轮系中,已
- 周转轮系中自由度为2,轮系是().
- 为什么把计算机称为电脑,它能实现哪些人类
- 双曲柄机构中,曲柄一定是最短杆。
- 槽轮机构是将()转换为()运动。
- 机械效率的计算式可用来判断机械是否发生自
- 研究机械平衡的目的是部分或完全消除构件在
- 在图示的机构中,已知Q为工作阻力,F为驱
- 图示转动副在驱动力矩Md
- 机械运转速度波动的形式有()。
- 在图示双螺旋桨飞机的减速器中,已知z
- 对周期性速度波动进行调节的原理和方法是什
- 构成运动副的两个构件间的接触有()的形式
- 如图所示的曲柄滑块机构中,细线小圆表示转
- 图示为建筑用铰车的行星齿轮减速器。已知z
- 在下图所示的铰链四杆机构中,各杆的长度分