试题详情
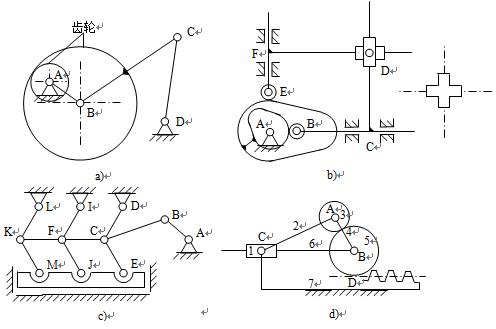
- 简答题 试计算图示各机构的自由度。图a、d为齿轮—连杆组合机构;图b为凸轮—连杆组合机构(图中在D处为铰接在一起的两个滑块);图c为一精压机机构。并问在图d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?
-
分析:A为复合铰链,不存在局部自由度和虚约束。
F=3n-(2pL+pH)=3×4-(2×5+1)=1
或F=3n-(2pL+pH-p')-F'=3×4-(2×5+1-0)-0=1
b) 分析:B、E为局部自由度。
F=3n-(2pL+pH)=3×5-(2×6+2)=1
或F=3n-(2pL+pH-p')-F'=3×7-(2×8+2-0)-2=1
注意:该机构在D处虽存在轨迹重合的问题,但由于D处相铰接的双滑块为一个Ⅱ级杆组,未引入约束,故机构不存在虚约束。如果将相铰接的双滑块改为相固联的十字滑块,则该机构就存在一个虚约束。
c) 分析:该机构存在重复结构部分,故存在虚约束。实际上,从传递运动的独立性来看,有机构ABCDE就可以了,而其余部分为重复部分,则引入了虚约束。
F=3n-(2pL+pH)=3×5-(2×7+0)=1
或F=3n-(2pL+pH-p')-F'=3×11-(2×17+0-2)-0=1
d) 分析:A、B、C为复合铰链;D处高副的数目为2。不存在局部自由度和虚约束。
F=3n-(2pL+pH)=3×6-(2×7+3)=1
或F=3n-(2pL+pH-p')-F'=3×6-(2×7+3-0)-0=1
齿轮3与5的中心距受到约束,轮齿两侧齿廓只有一侧接触,另一侧存在间隙,故齿轮高副提供一个约束。
齿条7与齿轮5的中心距没有受到约束,两齿轮的中心可以彼此靠近,使轮齿两侧齿廓均接触,因轮齿两侧接触点处的法线方向并不重合,故齿轮高副提供两个约束。 关注下方微信公众号,在线模考后查看

热门试题
- 当两构件组成移动副时,无法求相对速度瞬心
- 在图所示的铰链四杆机构中,各杆的长度为l
- 飞轮是如何调节周期性速度波动的?
- 对于周期性速度波动应如何调节()。
- 简述曲柄摇杆机构特征、作用?
- 如图所示电动三爪卡盘传动轮系中,已知各齿
- 在设计滚子从动件盘形凸轮轮廓曲线中,若出
- 在铰链四杆机构中,若存在曲柄,则曲柄一定
- 在设计一对渐开线直齿圆柱变位齿轮传动时,
- 平行轴外啮合斜齿圆柱齿轮的正确啮合条件是
- 下列机构中,压力角可能恒为零的机构是()
- 在铰链四杆机构中,固定最短杆的邻边可得曲
- 正变位齿轮与标准齿轮相比,齿距()。
- 在平面机构中若引入PH
- 在图示轮系中,已知z1
- 在曲柄摇杆机构中,当摇杆为主动件时曲柄摇
- 标准直齿轮以标准中心距安装时,下列选项不
- 节圆是一对齿轮在啮合时才存在的量。
- 转子动平衡后一定是静平衡的。
- 已知一对渐开线直齿圆柱标准齿轮传动,m=