试题详情
- 单项选择题 图示电路中,电压U为()
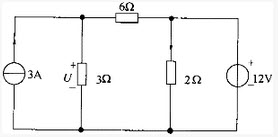
A、30V
B、9V
C、10V
D、6V
- C
关注下方微信公众号,在线模考后查看

热门试题
- 过盈联接装配时压入过程应连续,速度应稳定
- ZKRT300型机器人中L298N最高工
- 真空中有两根互相平行的无限长直导线L
- 图示为共发射极单管电压放大电路,估算静态
- STC12C5A60S2单片机内部集成了
- 代号为“6205/P6”的滚动轴承内径为
- 机器人感知自身或者外部环境变化信息是依靠
- 波峰焊中的三个主要工艺因素是()。
- 1906年美国人()制造了第一颗真空栅极
- 在C51中,要清除P1端口的P1.4~P
- 在图a)电路中有电流I时,可将图a)等效
- ZKRT-300机器人的行走电机是()。
- 图示正弦交流电路中,已知电流表A的读数为
- 图示为刀闸、熔断器与电源的三种连接方法,
- 下列关于舵机结构说法正确的是()。
- 图示电路在开关S闭合后的时间常数&tau
- 正弦振荡电路自激条件
- 在拆焊时,划针(通针)用于穿孔或协助烙铁
- 已知:R0=28H(28H)=46HMO
- 如图所示,导体回路处在一均匀磁场中,B=