试题详情
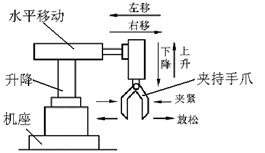
- 简答题 已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。 物料搬动机械手结构原理图
-
系统设计的详细工程路线:
1)确定目标及技术规范:
机械手的用途:物料搬运。
工作方式:手动、自动方式。
主要技术参数:3自由度。
使用环境要求:生产线。
2)可行性分析:
收集资料、市场分析、可行性分析、技术经济性分析。
3)总体方案设计:
机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。
4)总体方案的评审、评价:
5)理论分析阶段:机构运动学模型、作业空间分析;机构的力学计算;驱动元件的选择、动力计算;传感器选择、精度分析;建立控制模型、仿真分析。
6)详细设计:
包括系统总体设计,业务的划分;控制系统设计;程序设计;后备系统设计;设计说明书、使用说明书。
7)详细设计方案评价
8)试制样机:机械本体、动力驱动系统、供电系统、控制系统、传感器、检测系统。
9)机械手样机的实验测试:调试控制系统、控制性能测试、功能测试、精度、工作空间测试、动态指标测试、作业试验。
10)技术评价与审定:对样机及其性能进行综合评价,提供改进意见,对不满意的部分进行修改,直至样机合格后方可进入下一步骤。
11)小批量生产。
12)试销。
13)正常生产。
14)销售。 关注下方微信公众号,在线模考后查看

热门试题
- 滚珠丝杠副中滚珠的循环方式有外循环和()
- 什么是信号解调?
- 机电一体化产品的现代设计方法有哪些?
- 异步电动机的转差率为大于1时,电机运行于
- 机电一体化系统由哪几部分组成?
- 试分析比较直流电机和液压马达实现转动输出
- 简答通用微机控制系统核心部件,通用微机控
- S7-200 PLC的控制程序通常由()
- 测量位移的传感器常用的有哪些?
- 快速排气阀简称快排阀,是为了加快气缸运动
- 顺序控制包括以状态控制为主和以时间控制为
- 一般采用什么方法使得按键单次响应?
- 大惯量直流电机负载能力(),而小惯量直流
- S7-200的通信协议为()。
- 影响螺旋传动精度的主要因素主要有哪些?如
- 机械传动系统中,影响系统传动精度的误差可
- 下列传感元件的属于物理型()。
- 神经网络可以和模糊逻辑一样适用于任意复杂
- 简述PLC系统与继电器接触器控制系统的区
- 典型开关量I/O模板的I/O电气接口的主