试题详情
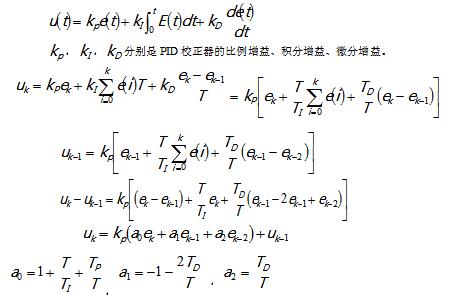
- 简答题试采用后向差分法推导数字PID递推控制算法。
关注下方微信公众号,在线模考后查看

热门试题
- 保持系统刚度足够大,其主要原因是为了使系
- 以下属于机械电气化特性的是()
- 分析下图调整齿侧间隙的原理。
- 工业三大要素指的是什么?
- 相敏检波电路是信号调制电路。
- 简述网络常用的通道利用方式有几种,各有何
- 三相交流异步电动机的铁芯用硅钢片的厚度一
- 三相异步电动机常用的调速方法有变极调速、
- 简述步进电动机驱动电路的组成。
- 单片机也可称为()或()
- 模拟式传感器信号处理过程包括哪些环节?
- 什么是压电效应?压电式加速度传感器的工作
- 系统论、()、()是机电一体化技术的理论
- 伺服系统就是以机械的位置作为被控制量,能
- 齿轮传动比的分配中,传动比分配的结果为各
- ()用来检测气缸活塞位置,即检测活塞的运
- 直流伺服电机的机械特性指当控制电压U
- 直流电动机中电枢绕组流过的电流为()。
- 电动机中引入电流环后的伺服系统下列叙述正
- 若一台变压器若将其原边外加电压U1和频率