试题详情
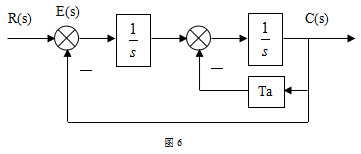
- 简答题 系统结构如图6所示. 1.试绘制Ta=0时的闭环极点; 2.确定使系统为过阻尼状态时的Ta值范围; 3.确定阻尼比§=0.5时的Ta值,确定相应的闭环极点位置,并计算此时输入r(t)=t时系统的稳态误差ess
-
1.s1=j s2=-j
2. 2
3. Ta=1,λ1=-0.5+j0.866,λ2=-0.5-j0.866, ess=1
关注下方微信公众号,在线模考后查看

热门试题
- 主机遥控系统重复起动回路的基本功能是(
- 在NAKAKITA型燃油粘度控制系统中,
- 微分调节器是否能单独工作,请说明其原因,
- 在空气反冲式自清洗滤器的自动控制系统中,
- ()是一种图解分析法,适用于具有严重非线
- 在用PI调节器组成的燃油粘度控制系统中
- 利用串联超前校正可以同时改善系统的超调量
- M58型气动调节器的工作原理及可调参数为
- 当且仅当特征方程的全部特征根分布在z平面
- 阻尼比ζ
- 在锅炉水位自动控制系统中,在额定负荷情况
- 对于以下情况应绘制0°根轨迹的是
- 串联滞后校正用于改善系统的稳态性能,而且
- 系统结构图如图,求传递函数C(s)/R(
- 随动控制系统
- 常用的校正装置有()、()、()。
- 利用奈奎斯特图可以分析闭环控制系统的()
- z变换
- 传递函数的零点和极点对输出的影响不同,其
- 在采用PID调节器的定值控制系统中,当T