试题详情
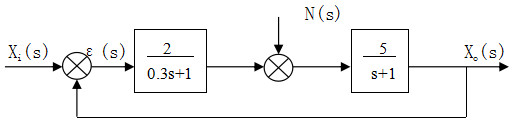
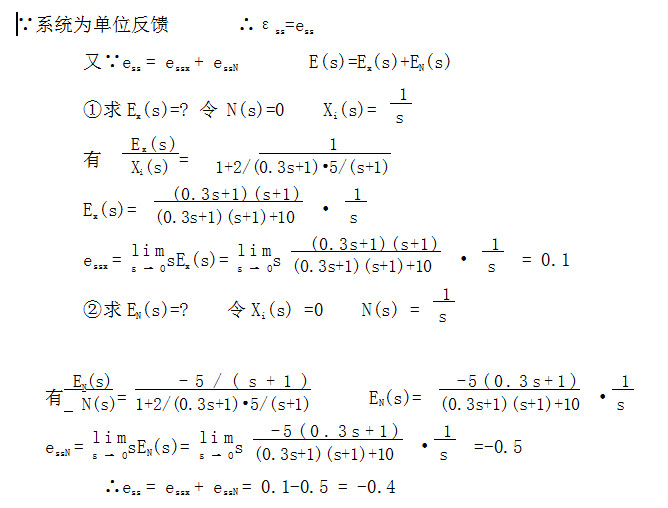
- 简答题 设控制系统如下图所示,其中给定输入信号xi(t)=u(t),扰动信号n(t)=u(t),试计算该系统的稳定误差。
-
关注下方微信公众号,在线模考后查看

热门试题
- 以下环节中可以作为相位校正超前环节的是(
- 在阶跃函数输入作用下,阻尼比()的二阶系
- 如图所示是一个空间起飞助推器的姿态控制模
- 已知某一系统的微分方程组为: 式中R<
- 根据控制系统元件的特性,控制系统可分为线
- 某系统如例图所示,试求其无阻尼自振角频率
- 非线性系统的最主要特性是()
- 已知最小相位系统的对数幅频渐进特性曲线如
- 系统的稳定性
- 某单位反馈系统,其开环传递函数为: ①试
- 反映控制系统稳态性能的指标为()
- 试说明如题图(a)所示液面自动控制系统的
- 瞬态响应
- 一阶系统时间常数为T,在单位阶跃响应误差
- 在易燃易爆的场合应采用气动阀作为执行机构
- 系统的穿越频率越大,则其()
- 传递函数的极点
- 由质量、弹簧、阻尼器组成的机械系统如下图
- 增大系统开环增益可以()
- 操作指导控制系统可以实现最优控制。