试题详情
- 简答题 已知受控系统传递函数为
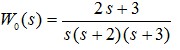 ,请设计状态反馈阵
,请设计状态反馈阵 ,使得闭环极点位于为:λ1=-1.26-j1.29,λ2=-1.26+j1.29,λ3=-20。 (1)写出系统的状态空间表达式的控制器规范型。 (2)求出加入状态反馈阵后闭环特征多项式。 (3)确定希望的闭环特征多项式。 (4)计算其状态反馈阵。
,使得闭环极点位于为:λ1=-1.26-j1.29,λ2=-1.26+j1.29,λ3=-20。 (1)写出系统的状态空间表达式的控制器规范型。 (2)求出加入状态反馈阵后闭环特征多项式。 (3)确定希望的闭环特征多项式。 (4)计算其状态反馈阵。
-

关注下方微信公众号,在线模考后查看

热门试题
- 离散系统的状态方程为 (1)是否存在一
- 有离散时间系统如下,求Φ(k)、
- 试求下图系统的模拟结构图,并建立其状态空
- 开环系统的结构如图所示: 试用状态反馈
- 单输入单输出离散时间系统的差分方程为
- 已知系统传递函数阵为试判断该系统能否用状
- 如果一个系统的李雅普诺夫函数确实不存在,
- (1)能够通过状态反馈实现任意极点配置的
- 已知受控系统的方程为,请设计状态反馈控制
- 系统的模拟结构图为: (1)写出受控系
- 若一个对象的连续时间状态空间模型是能控的
- 已知系统的微分方程为: 试写出其对偶系统
- 试用变量梯度法构造下列系统的李雅普诺夫函
- 已知单位负反馈最小相位系统A的开环频率特
- 传递函数的状态空间实现不唯一的一个主要原
- 已知受控系统状态方程为: 设计状态反馈
- 已知某系统微分方程为: (1)写出系统的
- 已知两个系统S1、
- 由状态转移矩阵可以决定系统状态方程的状态
- 已知一单位反馈系统的开环传递函数为 试