试题详情
- 简答题图示刻字、成形机构为一凸轮—连杆机构,试分析该组合机构的组合方式,并指出其基础机构和附加机构。若工作要求从动件上点M实现给定的运动轨迹mm,试设计该组合机构。
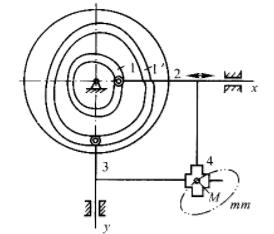
- 该组合机构是由两个直动滚子推杆盘形凸轮机构和自由度为2的四杆四移动副机构组合而成。其中,四杆四移动副机构为基础机构,两个自由度为1的凸轮机构为附加机构。机构的组合方式为并联式组合。
这类组合机构的设计思路如下:首先根据结构空间及要求实现的从动件运动轨迹的范围,确定基础机构的尺寸及凸轮转动中心的位置;然后根据从动件的运动轨迹,求出杆2及杆3的运动规律;最后根据求出的运动规律,设计两个凸轮的廓线。具体设计步骤如下:
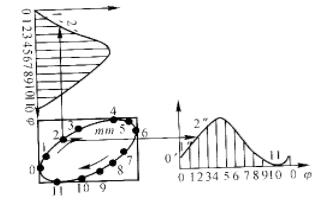
(1)根据生产工艺要求和运动规律,拟定出M点描绘给定轨迹mm的运行路线,如下图中箭头方向所示。然后根据工作要求和轨迹各段的变化情况,不均匀地标出0,1,2...各分点。
(2)作直角坐标系x0φ和y0φ。坐标x,y分别代表两凸轮从动件的位移,坐标φ代表凸轮转角。将凸轮转动一周的转角2π分为n等分,等分数应等于轨迹mm上的分点数。
(3)由轨迹mm上各分点分别作0x和0y垂线,再由两个坐标轴线的相应分点分别作其本身的垂线,两组垂线分别相交于点
(4)用光滑曲线分别连接上述两组交点,即得两凸轮从动件的位移线图x=x(φ)和y=y(φ)。
(5)根据位移线图,利用反转法原理绘制两个凸轮的理论廓线,而槽凸轮的实际廓线,即为一系列滚子圆的内、外包络线。
注:从动件复杂的运动轨迹采用凸轮—连杆机构来实现较为简单方便。
关注下方微信公众号,在线模考后查看

热门试题
- 在摆动导杆机构中,若以曲柄为原动件,则机
- 试绘制图n所示仿人手型机械手的食指机构的
- 虚约束对运动不起真正的约束作用,那么机构
- 图示为两同轴线的轴1和2以摩擦离合器相连
- 阿基米德蜗杆的模数m取()值为标准值。
- 如图所示的曲柄滑块机构,曲柄AB作等速回
- 转子的平衡有刚性与挠性之分的依据是()。
- 行星轮系的同心条件是指:()。
- 已知一渐开线标准斜齿圆柱齿轮与斜齿条传动
- 机构处于死点位置时,其传动角γ为()度,
- 渐开线齿轮的齿廓形状取决于()半径的大小
- 如图所示电动三爪卡盘传动轮系中,已知各齿
- 齿轮分度圆与节圆的关系()。
- 周期性速度波动一般用()调节其速度波动。
- 某自动机床的工作台要求有六个工位,转台停
- 试画出图示平面机构的机构示意图,并计算自
- 速度瞬心法一般用在什么场合?能否利用它进
- 若从动件的运动规律选择为等速运动规律、等
- 主动齿轮与从动齿轮转速之比是它们齿数的(
- 铰链四杆机构存在曲柄的必要条件是最短杆与