试题详情
- 简答题
某工作台采用直流电机丝杠螺母机构驱动如图所示,已知电机轴的转动惯量Jm=4×10-4kg·m3,与电机输出轴相连的小齿轮的转动惯量J1=1×10-4kg·m3,大齿轮的转动惯量J2=1.8×10-4kg·m3,丝杠的转动惯量Js=3.8×10-4kg·m3。工作台的质量m=50kg,丝杠导程t=5mm,齿轮减速比为i=5。
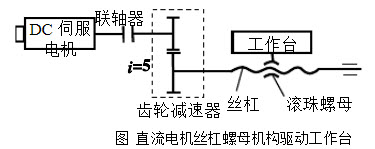 试求:电机轴上的总转动惯量J。
试求:电机轴上的总转动惯量J。
- J=J1+Je=1×10-4+12.88×10-4=13.88(kg·m3)
关注下方微信公众号,在线模考后查看

热门试题
- 数控机床中的计算机属于机电一体化系统的控
- 反求设计是建立在概率统计基础之上,主要任
- 传动机构的转动惯量取决于机构中传动件的质
- 机电一体化技术是以()部分为主体,强调各
- 下列哪个不是传感器的动特性?()
- 对于执行装置,选择较大的传动比可使系统的
- 什么是伺服系统?伺服系统的一般组成有哪几
- 减小系统的阻尼和摩擦力均有利于提高系统的
- 采用偏心轴套调整法对齿轮传动的侧隙进行调
- 机电一体化系统设计的质量管理主要体现在(
- 为适应工业仪表的要求,D/A的输出要配接
- 数控机床进给系统的伺服电机属于设备的()
- 绝对式光电编码器的输出量为脉冲信号,可以
- 在滚珠丝杠螺母间隙的调整结构中,齿差式调
- 驱动部分在控制信息作用下提供动力,伺服驱
- 阻尼比除了与机械系统的粘性阻尼系数B有关
- 简述机械系统的刚度对系统动态特性的影响。
- 简述开关量输出模板的基本组成。
- 在传动系统中,转动惯量增大使机械负载增加
- 机电一体化产品设计类型可以分为()、()