试题详情
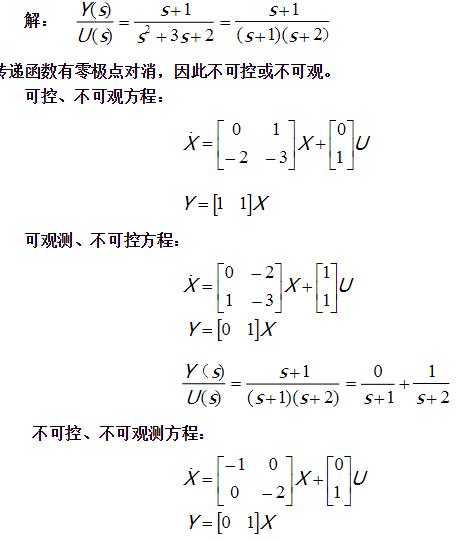
- 简答题 已知系统传递函数为
 ,试写出系统可控、不可观测,可观测,不可控,不可控、不可观测的动态方程。
,试写出系统可控、不可观测,可观测,不可控,不可控、不可观测的动态方程。
-
关注下方微信公众号,在线模考后查看

热门试题
- 计算机建模的方法有哪些?什么叫参数化建模
- 求f(kT)=kexp(-akT)的Z变
- 离散相似法采样周期的选择应该满足()。
- 离散事件仿真模型的设计与实现?
- 采用装配法创建机构模型的特点是什么?有什
- 写出sys=zpk({[];[23]},
- 被创建的构建上有若干个Marker,请问
- 已知离散系统状态空间表达式: 试用MA
- 已知线性定常系统的状态空间表达式为 且
- 已知系统传递函数为,试写出系统可控、不可
- 根据模型不同可以把控制系统仿真分为()、
- 求函数y(t)=exp(-t)*|sin
- 串联校正主要包括()、()、()。
- 设系统结构图如下,试编程求系统单位阶跃响
- 已知系统结构图如下,试采用四阶龙格-库塔
- 机构运动学分析与动力学分析的区别是什么?
- 系统的结构如下图所示: 写出判断闭环系
- 相似的常用方法有()、()、()、()。
- 已知系统传递函数,试求约当型动态方程,并
- 单步法与多步法、显式法与隐式法、定步长与