试题详情
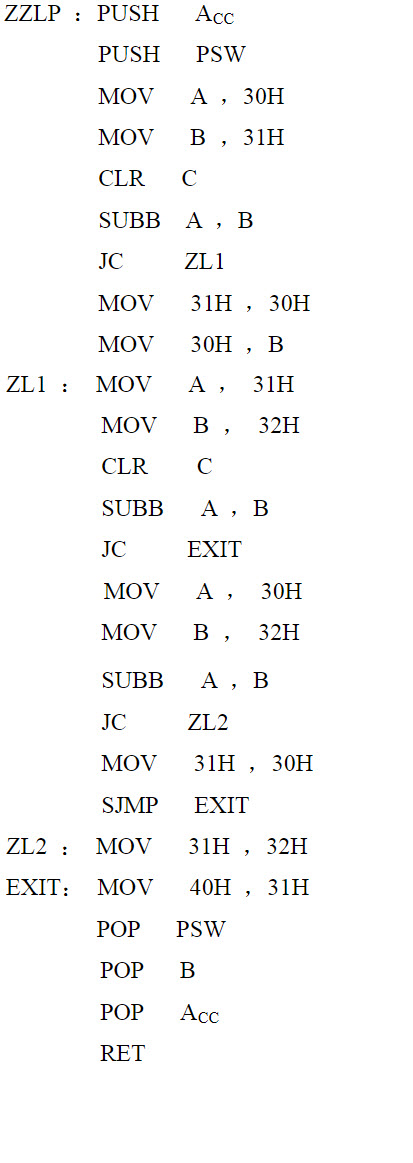
- 简答题设有三个采样值X1,X2和X3,分别存放在30H,31H和32H中,现采用中值滤波法进行滤波,滤波结果存放在40H,请设计程序。
-
关注下方微信公众号,在线模考后查看

热门试题
- 理想微分环节的传递函数为()
- 一阶系统的单位阶跃响应在t=0处的斜率越
- 前馈控制系统的迭用原则是什么?
- 已知系统的开环传递函数为 若要求系统的
- 控制系统的误差是期望输出与()之差。
- 串联校正按校正环节Gc(s)的性质可分为
- 分布式控制系统的结构有()
- 操作指导控制系统可以实现最优控制。
- 关于顺馈校正说法正确的是()
- 干扰作用下,偏离原来平衡状态的稳定系统在
- 设一单位反馈控制系统的开环传递函数为:试
- 开环传递函数的积分环节v增加,系统的稳态
- 如图所示是一个空间起飞助推器的姿态控制模
- 设某闭环系统的开环传递函数为试求系统稳定
- 简述三种典型输入信号的数学描述。
- 以下环节中可以作为相位校正超前环节的是(
- 控制系统含有的积分个数多,开环放大倍数大
- 无差系统是指()为零的系统。
- 已知如下框图,且有x0
- 在直流电动机的电枢回路中,以电流为输出,