试题详情
- 简答题 有系统:
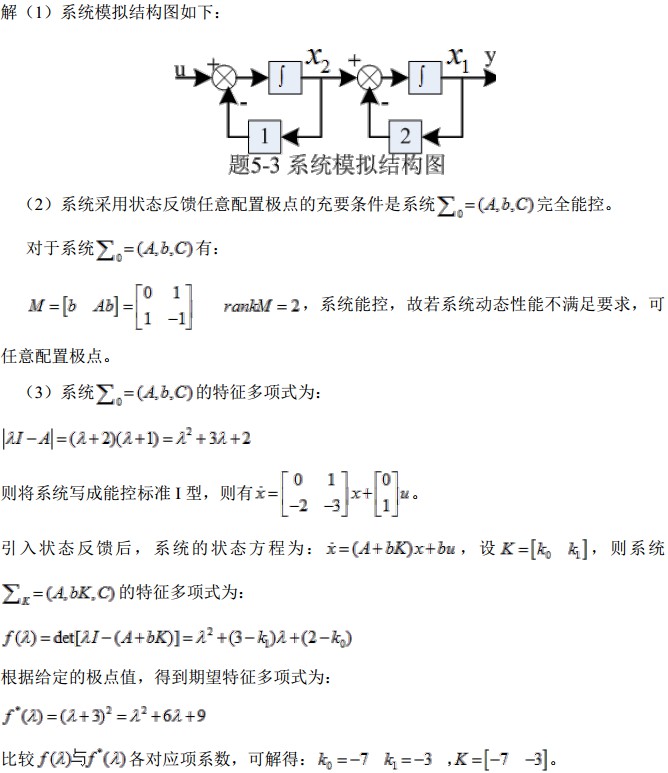
 (1)画出模拟结构图。 (2)若动态性能不满足要求,可否任意配置极点? (3)若指定极点为-3,-3,求状态反馈阵。
(1)画出模拟结构图。 (2)若动态性能不满足要求,可否任意配置极点? (3)若指定极点为-3,-3,求状态反馈阵。
-
关注下方微信公众号,在线模考后查看

热门试题
- 有系统如图所示,试求离散化的状态空间表达
- 设某单位反馈系统,其开环传递函数 要求K
- 试用V(x)=x1
- 已知系统传递函数,试求出系统的约旦标准型
- 双足直立机器人可以近似为一个倒立摆装置,
- 将下列状态方程化为对角标准型。
- 离散系统的状态方程为 (1)是否存在一
- 单位反馈系统开环传递函数为 试求闭环频
- 已知某线性时变系统的状态方程为:,求出系
- 单输入单输出离散时间系统的差分方程为
- (1)试问状态转移矩阵的意义是什么? (
- 已知二阶系统的状态方程: 试确定系统在
- 证明对于线性定常系统的线性变换,其传递函
- 给定系统的状态空间表达式为, 试确定该系
- 简述滞后-超前校正的原理
- 已知受控系统状态方程为: 设计状态反馈
- 已知系统,判定该系统是否完全能观?
- 如图所示为一个摆杆系统,两摆杆长度均为L
- 已知系统的传递函数为 (1)采用串联分解
- 用三种方法计算以下矩阵指数函数e