试题详情
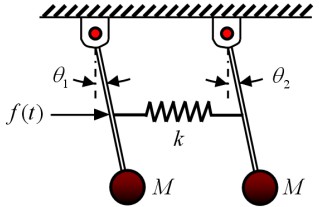
- 简答题 如图所示为一个摆杆系统,两摆杆长度均为L,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M)视为质点,两摆杆中点处连接一条弹簧,θ1与θ2分别为两摆杆与竖直方向的夹角。当θ1=θ2时,弹簧没有伸长和压缩。水平向右的外力f(t)作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小,满足近似式sinθ=θ,cosθ=1。 (1)写出系统的运动微分方程; (2)写出系统的状态方程。
-


关注下方微信公众号,在线模考后查看

热门试题
- 试用lyapunov第二法确定下列系统原
- 下列矩阵是否满足状态转移矩阵的条件,如果
- 设计一个前馈补偿器,使系统解耦,且解耦后
- 输出变量是状态变量的部分信息,因此一个系
- 具有对角型状态矩阵的状态空间模型描述的系
- 已知系统方程为:, (1)求系统的平衡态
- 已知系统传递函数,求出系统的约旦标准型的
- 给定下列状态空间表达式 ,求出系统的传
- 已知系统的传递函数为 (1)采用串联分解
- 由一个状态空间模型可以确定惟一一个传递函
- 求下列状态空间表达式的解: 初始状态,
- 已知某一控制系统如图所示,其中G
- 实际被控系统通常是连续时间系统,但计算机
- 已知系统状态方程:其中a≥0, 试
- 设∑1和&
- 单位反馈系统开环对数幅频特性如右图,试求
- 给定系统的状态空间表达式为 设计一个具
- 单输入单输出离散时间系统的差分方程为
- 已知系统状态方程为: 试设计一状态反馈
- 已知对象的状态空间模型,是完全能观的,请