试题详情
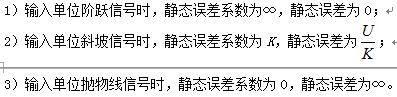
- 简答题简答Ⅰ型系统在不同输入(阶跃、斜坡、抛物线)信号作用下,系统的静态误差和静态误差系数。
-
关注下方微信公众号,在线模考后查看

热门试题
- 控制系统中的系统软件包括()
- 设某闭环系统的开环传递函数为试求系统稳定
- 一阶系统的传递函数为G(s)=7/(s+
- 开环增益K增加,系统的稳定性()
- 闭环系统稳定的充分必要条件是其开环极坐标
- 非线性系统的最主要特性是()
- 两个二阶系统的超调量MP相等,此二阶系统
- 已知某一系统的微分方程组为: ①x
- 串级控制系统参数整定中两步整定法的步骤是
- 作为系统稳定或不稳定程度的度量,幅值欲度
- 以下几个微分方程表示的系统中,属于线性定
- 干扰作用下,偏离原来平衡状态的稳定系统在
- 以下关于系统模型说法正确的是()
- 关于相位超前校正的作用和特点的说法错误的
- 单位斜坡信号的拉氏变换为()
- 某系统如例图所示,试求其无阻尼自振角频率
- 一个系统稳定的充分和必要条件是系统()
- 一阶系统是()
- 惯性环节的转折频率越大其()
- 线性定常系统的偏差信号就是误差信号的条件