试题详情
- 简答题位置随动系统如图所示,其中
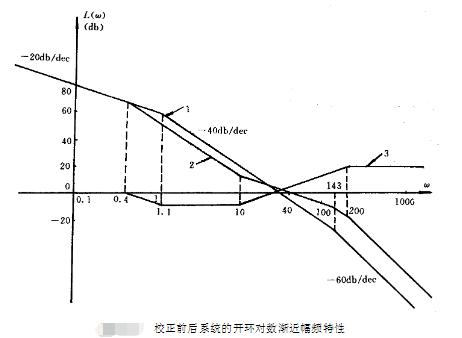
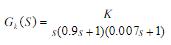 要求串入校正装置Gc(s),使系统校正后满足下列性能指标: (1)系统仍为I型,稳态速度误差系数Kv≥1000(1/s), (2)调节时间ts0.25(s),超调量σP%≤30%。
要求串入校正装置Gc(s),使系统校正后满足下列性能指标: (1)系统仍为I型,稳态速度误差系数Kv≥1000(1/s), (2)调节时间ts0.25(s),超调量σP%≤30%。 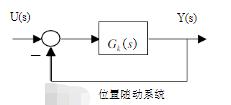
关注下方微信公众号,在线模考后查看

热门试题
- 给定系统的状态空间表达式为 设计一个具
- 已知如图所示的系统,其中子系统1、2的传
- 若传递函数存在零极相消,则对应的状态空间
- 简述超前校正的原理
- 已知某线性时变系统的状态方程为:,求出系
- 已知受控系统传递函数为, 综合指标为:&
- 若一线性定常系统的平衡状态是渐近稳定的,
- 证明:等价的状态空间模型具有相同的能控性
- 利用李雅普诺夫第二方法判断系统是否为大范
- 设某单位反馈系统的开环传递函数 要求闭环
- 给定系统状态空间模型 (1)试问如何判断
- 已知系统,判定该系统是否完全能观?
- 开环系统的结构如图所示: 试用状态反馈
- 如图所示为一个摆杆系统,两摆杆长度均为L
- 已知单位负反馈最小相位系统A的开环频率特
- 求下列状态空间表达式的解:输入u(t)是
- 已知系统的状态空间表达式为 试求当时u=
- 系统如图所示,原系统开环传递函数为 式中
- 已知系统方程为:, (1)求系统的平衡态
- 对一个系统,只能选取一组状态变量。