试题详情
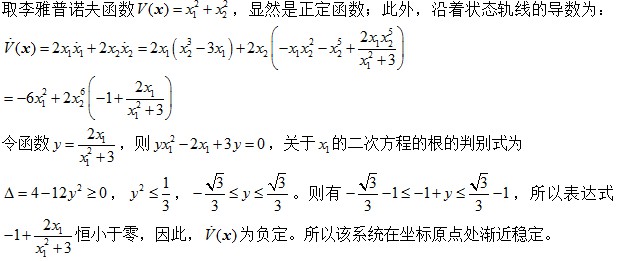
- 简答题 某2阶非线性系统的状态方程为
 ,证明该系统在坐标原点处渐近稳定。
,证明该系统在坐标原点处渐近稳定。
-
关注下方微信公众号,在线模考后查看

热门试题
- 利用李雅普诺夫第二方法判断系统是否为大范
- 双足直立机器人可以近似为一个倒立摆装置,
- 已知系统,判定该系统是否完全能观?
- 考虑由下式确定的系统:试求其状态空间实现
- 要求kv=20,&
- 状态反馈不改变系统的能控性。
- 等价的状态空间模型具有相同的传递函数。
- 设某单位反馈系统,其开环传递函数 要求K
- 单输入单输出离散时间系统的差分方程为
- 系统的模拟结构图为: (1)写出受控系
- 开环系统的结构如图所示: 试用状态反馈
- 如图所示为一个摆杆系统,两摆杆长度均为L
- 已知系统的状态空间表达式为 试求当时u=
- 已知一反馈控制系统的开环传递函数为&en
- 状态变量是用于完全描述系统动态行为的一组
- 实际被控系统通常是连续时间系统,但计算机
- 已知系统的状态空间描述如下:其中a、b、
- 要使得观测器估计的状态尽可能快地逼近系统
- 系统能控的状态变量个数是(),能观测的状
- 已知某一控制系统如图所示,其中G